Takeoff field length
Minimizing runway required for takeoff is all about balance
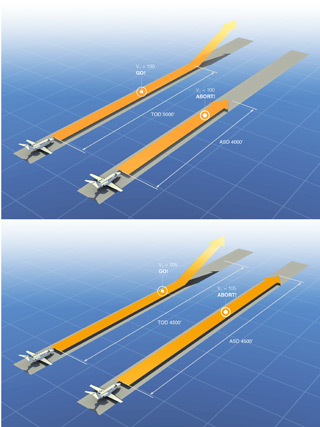 The left illustration shows a hypothetical unbalanced takeoff situation: the 5,000-foot takeoff distance (TOD) is higher than the accelerate-stop distance (ASD), so the airplane legally requires 5,000 feet of runway. By raising V1 slightly (below), the airplane will spend less time accelerating with only one engine operative, should an engine fail, so TOD decreases. While the increase in V1 will raise ASD, the required runway length decreases 500 feet, compared to the unbalanced V1 situation.
The left illustration shows a hypothetical unbalanced takeoff situation: the 5,000-foot takeoff distance (TOD) is higher than the accelerate-stop distance (ASD), so the airplane legally requires 5,000 feet of runway. By raising V1 slightly (below), the airplane will spend less time accelerating with only one engine operative, should an engine fail, so TOD decreases. While the increase in V1 will raise ASD, the required runway length decreases 500 feet, compared to the unbalanced V1 situation.
The light jets currently in production offer an amazing level of safety capability not found in their lighter piston and turboprop brethren. Operated by the book, these jets offer a takeoff-to-touchdown flight profile inside which an engine failure can occur at any moment without danger to the occupants. As long as the aircraft is flown properly, and the performance data in the aircraft flight manual (AFM) is respected, there is always a safe “out” available to the pilot following an engine failure.
This possibility starts at takeoff, with the guarantees represented by the AFM’s takeoff field length charts. By entering variables such as takeoff weight, flap setting, ambient temperature, and pressure altitude, the pilot is able to determine the minimum length of takeoff runway required. Built into this takeoff field length are several calculations designed to optimize safety and utility, as it is the highest of one of three numbers—the accelerate-stop distance (ASD), one-engine inoperative (OEI) takeoff distance (TOD), or the all-engine takeoff distance with a 15-percent margin added. For twin-engine jets, the reduction in performance following an engine failure usually is significant enough that the single-engine TOD is more restrictive than 115 percent of all-engine TOD, so takeoff performance tends to be limited by either ASD or OEI TOD.
Understanding how these numbers are calculated is critical to the safe operation of jets. ASD is the total amount of runway required to accelerate—and then stop—the aircraft with an engine failed at a speed called VEF. VEF is not published by the manufacturer, but the next relevant speed, V1, is. After the engine fails at VEF, V1 is the speed by which the first abort action must be performed, which typically is application of the wheel brakes.
V1 must be greater than VEF, and VEF may not be lower than the minimum controllable speed of the aircraft on the runway with one engine inoperative, VMCG. To minimize ASD, the slowest allowable VEF and V1 are desirable—the earlier the takeoff is aborted, the less runway will be required to stop. A low V1, however, extracts a performance penalty in the other critical computation—OEI TOD.
OEI TOD is calculated by failing an engine at the same VEF that was used to calculate ASD, but with the takeoff continuing, rather than being aborted. The aircraft is accelerated on one engine to rotation speed, rotated, and brought into the air. When the aircraft reaches 35 feet above the runway, the total distance between that point and the start of the takeoff roll is measured to determine the TOD number.
If a low VEF and V1 require that the aircraft accelerate and climb on one engine for a long period of time, the TOD will increase. A higher VEF and V1, in contrast, will minimize the time in the takeoff roll during which the aircraft is operating on one engine, and improve TOD. The manufacturer’s goal, then, is to select a V1 speed that balances the low V1 that would minimize ASD and the high V1 that would minimize TOD.
Ideally, this V1 leads to balanced field performance—ASD and TOD being exactly equal. In “balancing the field,” the manufacturer is able to achieve the shortest possible takeoff field requirement, while still assuring that the pilot can perform a safe abort or a single-engine takeoff, as appropriate, from any point during the takeoff roll.
>Neil Singer is a Master CFI with more than 7,200 hours in 15 years of flying.


